yolo网络结构详解
$$
\frac{x}{y}=z
$$
先来放上整个网络结构的示意图,图中所示为yolov5l的网络结构图
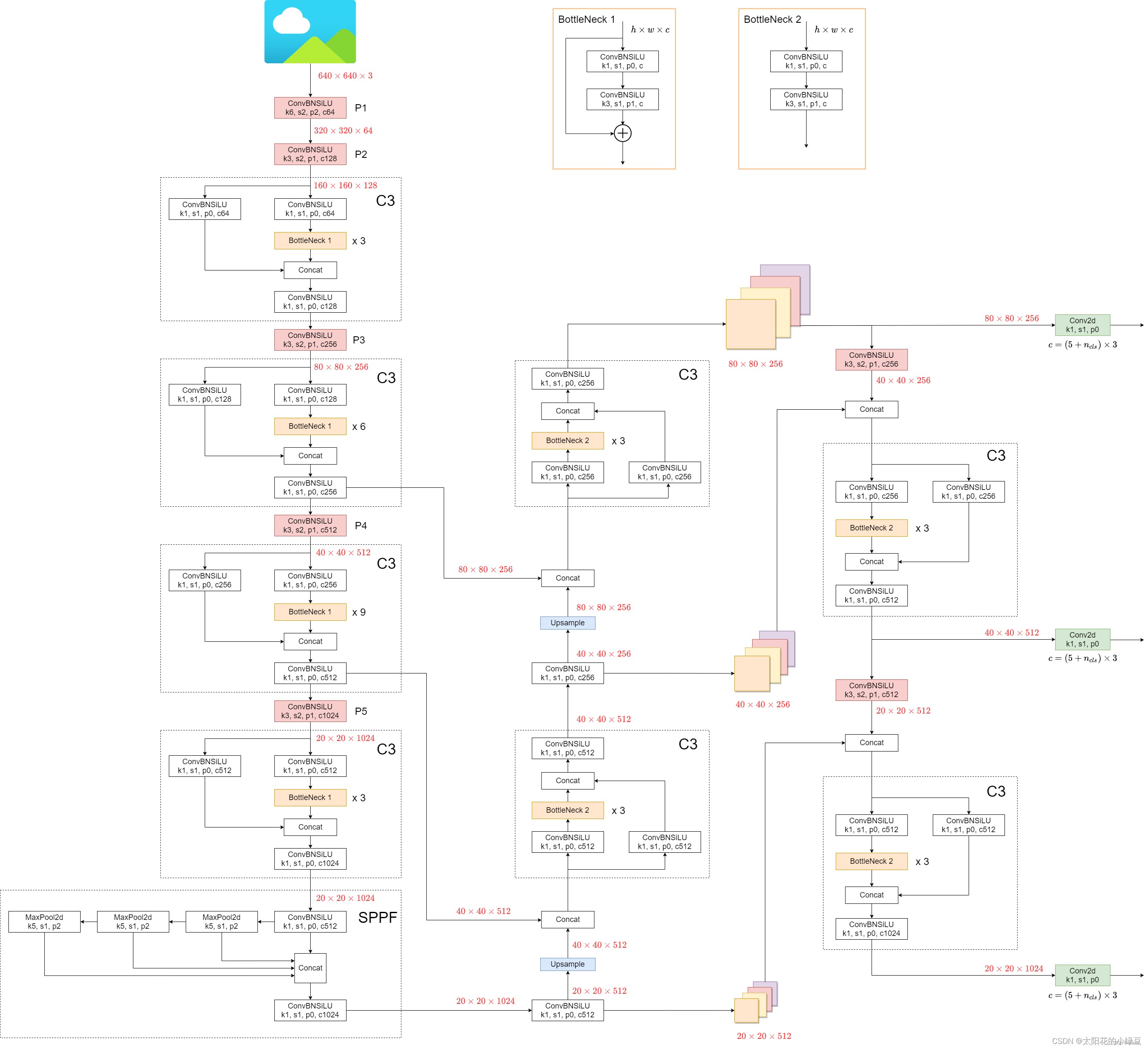
一、Backbone结构
1、Focus模块
进入backbone之前,对原始输入图像进行切片操作,每隔一个像素取一个值,图像高宽减半,通道数变为原来4倍,信息基本没有丢失,以yolov5s为例,输入图像640 *640 *3,经过Focus结构,变为 320 *320 *12,如图:640 *640 *3
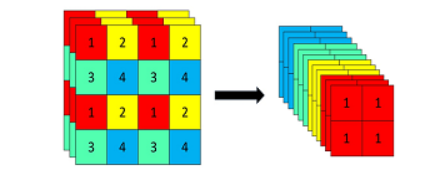
1 | # 展现在网络结构中就是先对输入图像进行切片操作,原始输入640* 640 *3, |
2、BottleNeck模块
下面两种BottleNeck模块分别用在模型的Backbone和neck部分,BottleNeck1用于Backbone,BottleNeck2用于neck,BottleNeck结构不改变图像高宽和通道数量。
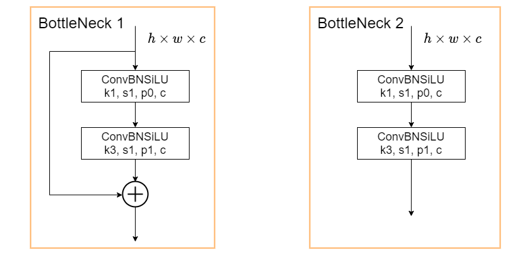
由一个1* 1卷积和3* 3卷积,再加上残差连接组成
1 | class Bottleneck(nn.Module): |
第一次进入BottleNeck1,图像形状为160* 160* 64,输出160* 160* 64
3、C3模块
如图,C3模块由1* 1卷积和BottleNeck模块组成,构成了yolov5的核心组成部分。整体来说,C3模块先对输入图像做通道数减半的1*1卷积并分支,其中一个分支经过若干个BottleNeck, 然后两个分支在通道维concat,concat后得到的输出通道就和输入通道数一样了,最后再来一个通道数不变的
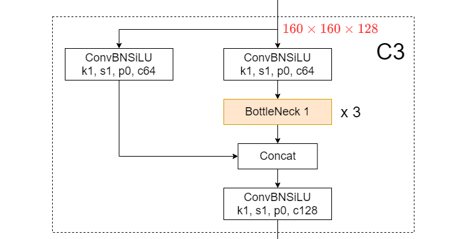
1 | class C3(nn.Module): |
4、后续网络走向
- 经过第一个C3模块,输出图像为160* 160* 128,然后一个卷积,变为80* 80* 256,此时得到的特征图称为P3
1 | (3): Conv( |
然后第二个C3模块,输入图像是80* 80* 256,输出图像也为80* 80* 256,然后一个卷积,变为40* 40* 512,此时得到的特征图称为P4
1
2
3
4# 第二个C3模块有9个BottleNeck
(5): Conv(
(conv): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(act): SiLU(inplace=True)然后第三个C3模块,输入图像是40* 40* 512,输出图像也是40* 40* 512,经过一个卷积,变为20* 20* 1024,此时得到的特征图称为P5
1
2
3
4# 第三个C3模块有9个BOttleNeck
(7): Conv(
(conv): Conv2d(512, 1024, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(act): SiLU(inplace=True)然后第四个C3模块(3个BottleNeck),输出图像是20* 20* 1024,输出图像也为20* 20* 1024,与之前不同的是这里并没有一个卷积使其图像高宽减半,通道数加倍,而是接一个SPPF模块
5、SPPF
SSPF模块将经过CBS的x、一次池化后的y1、两次池化后的y2和3次池化后的self.m(y2)先进行拼接,然后再CBS提取特征。 仔细观察不难发现,虽然SSPF对特征图进行了多次池化,但是特征图尺寸并未发生变化,通道数更不会变化,所以后续的4个输出能够在channel维度进行融合。这一模块的主要作用是对高层特征进行提取并融合,在融合的过程中作者多次运用最大池化,尽可能多的去提取高层次的语义特征。
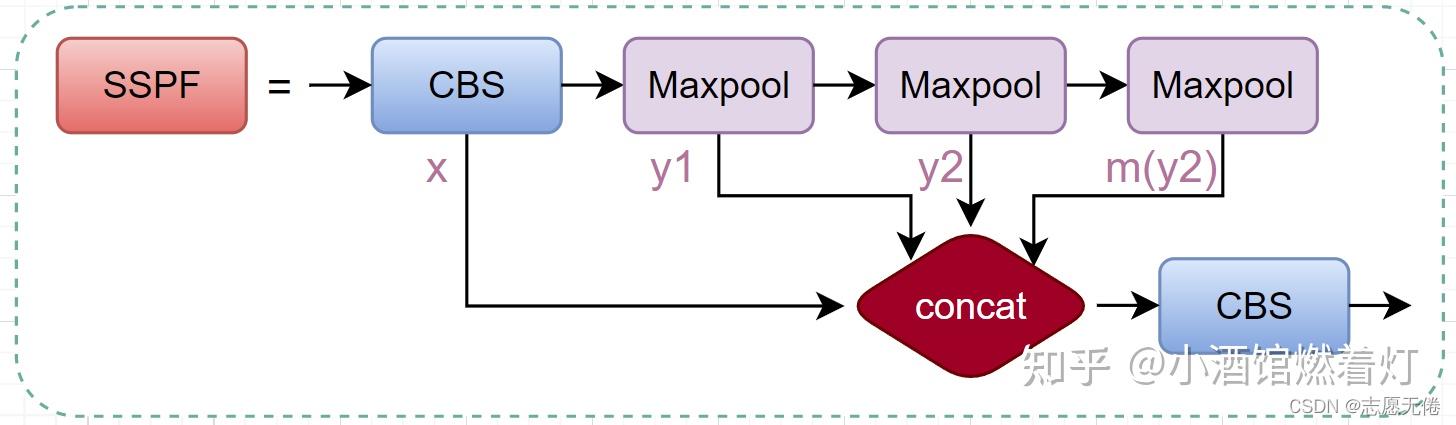
第三个C3模块结束后,进入SSPF模块,输入为20* 20* 20* 1024,先经过一个卷积cv1, 变为20* 20* 512,然后顺序经过kernel_size为5、9、13的最大池化层并依次输出,图像大小和高宽均不发生变化,最后将这四个输出在通道维concat起来,四个20* 20 512,拼接起来得到 20 * 20 2048,然后经过cv2,变为20* 20* 1024
1 | (8): SPP( |
至此,整个BackBone结构完毕,接下来分别是从第二个C3模块结束、第三个C3模块结束、SPPF模块结束引出的连接BackBone和Head(检测层)的Neck
二、Neck结构
按照整体网络结构图中由下至上的顺序
1、SPPF模块引出的neck
经过SPPF模块后,输出图像为20* 20* 1024,先经过一个卷积,通道数减半,变为20* 20* 512(记为n1,后面会用到),然后最近邻上采样,高宽加倍变为40* 40* 512,然后和第三个C3模块结束后的输出concat后变为40* 40* 1024,然后经过neck部分左下的C3模块,这里的C3会使输出通道数减半,高宽不变,输出40* 40* 512
1 | (10): Conv( |
得到输出40* 40* 512后,经过一个卷积,通道数减半,得到40* 40* 256(记为n2), 然后一个最近邻上采样,得到80* 80* 256,然后和第二个C3模块引出的neck拼接在一起,得到80* 80* 512
1 | (14): Conv( |
然后经过neck中左上角的C3模块,和左下角的C3模块一样,输出的图像高宽不变,通道数减半,关键是进入C3分支的两个卷积的输出通道都缩小了1/2(相比BackBone里的C3模块),输入为80* 80* 512,得到输出==80* 80* 256(记为n3),同时也是head1, 进入检测层==
1 | (17): C3( |
通过左上角的C3模块后,得到80* 80* 256的输出,然后进入一个卷积,通道数不变,高宽减半,输出为40* 40* 256,然后和n2的40* 40* 256concat,得到40* 40* 512,然后进入右上角的C3模块,右上角的C3模块和BackBone里的一样,不改变图像高宽和通道数,通过右上角的C3模块,得到输出为==40* 40* 512,也即head2,进入检测层==
1 | (20): C3( |
通过右上角的C3模块后,输出为40* 40* 512,然后先经过一个卷积,使图像高宽减半、通道数不变,得到20* 20* 512,然后和n1的20* 20* 512concat得到20* 20* 1024,然后进入neck的右下角的C3模块,这个C3模块和BackBone里的一样,不改变图像高宽和通道数,通过C3模块后得到输出为==20* 20* 1024,也即head3,进入检测层==
1 | (21): Conv( |
三、Head结构
经过前面的BackBone结构和Neck结构,得到head1(80* 80* 256)、head2(40* 40* 512)、head3(20* 20* 1024),3个head分别通过3个卷积变为80* 80* 21,40* 40* 21、 20* 20* 21。为什么是21?因为我的分类类别数nc=2,这里的输出通道数应为3*(nc+5)
1 | (24): Detect( |
分类和 bbox 检测等都是在同一个卷积的不同通道中完成,预测结果在通道维得到。



